2024年11月6日,由斯发基斯可信自主系统研究院(简称研究院)主办的“南方科技大学可信自主驾驶系统企业交流会“在工学院南楼813报告厅顺利举行。此次会议由斯发基斯可信自主系统研究院执行院长郝祁教授主持。2007年图灵奖获得者、斯发基斯可信自主系统研究院院长、计算机科学与工程系杰出访问教授Joseph Sifakis院士、南方科技大学电子与电气工程系讲席教授张宏院士、深圳市人工智能与机器人研究院、文远知行、元戎启行、中兴通讯、奥比中光、锐明技术、中科春意等研究机构、企业代表和专家、研究院部分师生出席了会议。

会议现场

会议合影
会议初始,Joseph Sifakis院士作开场主旨报告“Critical Configuration Testing of Four Open Self-driving Autopilots “。在报告中,Sifakis院士首先阐述了自主系统测试的重要性以及两种测试方法:一种是以参数生成的测试场景为基础;另一种是以多智能体的关键配置为基础。前者所面临的困难包括无法穷尽各类可能的危险章节;而后者利用多智能体系统在关键路段自发生成的危险场景来测试自动驾驶系统。报告最后给出了四种开源自动驾驶系统在多智能体仿真环境中关键路段的性能评价以及改进方向。该报告为自主无人系统的可信测试提供了新的思路。
Joseph Sifakis院士作报告
随后,张宏院士围绕“Applications of Foundation Models in Robotics“主题,简要介绍了团队目前部分科研成果和进展,他通过视频、图片和实例,形象生动地介绍了有关美团外卖配送机器人、机器人行人跟随、基础模型、机器人咖啡店等科研情况以及后续科研计划等。张院士着重探讨了基础模型在智能机器人中的应用架构、所面临的挑战以及未来发展方向。该报告在具身智能领域进行了许多前沿性的讨论,引起了听众的极大兴趣。在与听众的互动中,张院士生动幽默地回答了很多如何应用基础模型、如何应用具身智能技术的问题。

张宏院士作报告
郝祁教授以“Trustworthy Datasets and Simulation Platforms for L5 Autonomous Driving Technologies“为题,阐述了无人驾驶系统所面临的来自数据集与仿真系统的约束。报告指出只有在评价体系、场景生成以及智能转移这三方面进行实质性突破,面向L5级别的可信无人驾驶系统才有可能真正实现。
郝祁教授作报告
深圳元戎启行科技有限公司技术合伙人、副总裁刘念邱从“汽车遇上AI会有怎样的革新”题目入手,简要介绍了元戎启行公司的现况、辅助驾驶汽车与AI汽车等问题、以及未来的发展方向。

刘念邱副总裁作分享
李大川助理教授以“可信端到端自动驾驶”为切入点,介绍了自动驾驶端到端感知——预测的可信度量化评价方法、规则与学习联合驱动的自动驾驶控制架构,并探讨了强化学习自动驾驶控制的运行时安全保障问题。
李大川助理教授作分享
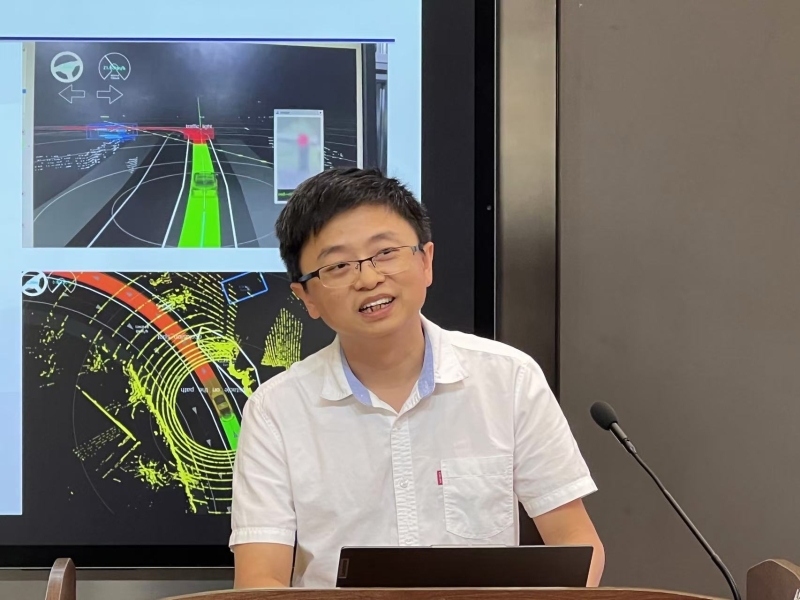
兰功金助理教授以“极端场景的自动驾驶感知”为主题,阐述了自动驾驶在极端场景感知中从数据到算法到验证的问题研究。
兰功金助理教授作分享
张美莹助理教授以“基于数据驱动的可信自动驾驶场景生成与评估系统”为主题,阐述了利用真实的路采数据,从可信数据的准确性出发,重建高保真的自动驾驶动态场景模型,并通过场景编辑技术实现多种危害因子的注入,为自动驾驶系统在极端场景下的感知、决策与控制能力提供创新的解决方案;除此之外,针对路采和生成的大规模自动驾驶数据,从可信数据的平衡性、多样性和复杂性出发,提出了基于主动学习的多阶段场景优化方法和基于模型的多指标统计评估方法,实现自动驾驶数据的自主优化与快速评估测试。
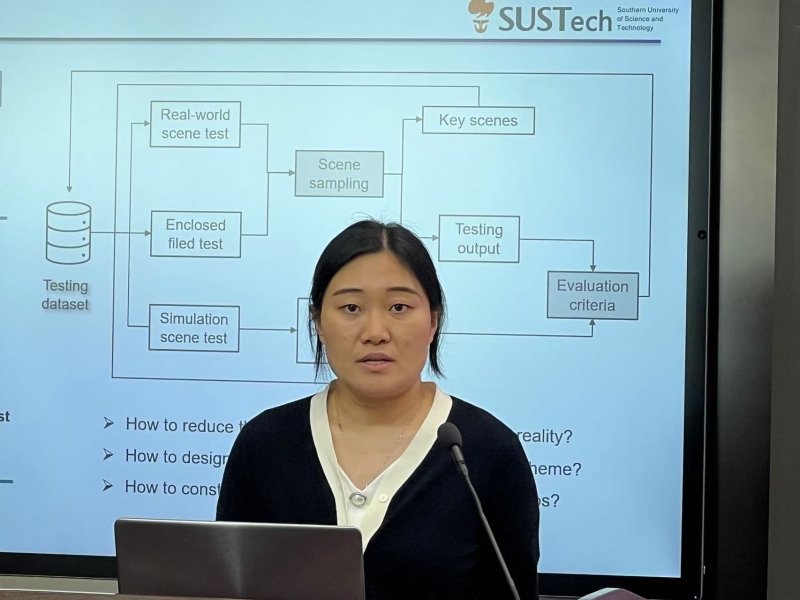
张美莹助理教授作分享
李鄂老师以“自动驾驶系统的硬件在环测试平台”为主题,介绍了硬件在环测试平台在自动驾驶研发中的优势,并详细讲解了斯发基斯可信自主系统研究院自动驾驶团队自主研发的硬件在环测试平台的设计思路和实现过程,展示了该平台在系统架构、数据处理、场景控制等核心技术上的实现方案。此外,他还介绍了平台的未来发展方向,提出引入更先进的仿真技术,以进一步提升平台的可用性和可靠性,为行业发展提供有力的技术支撑。
李鄂老师作分享
会上,参会专家、师生们就机器人、自动驾驶等相关问题进行了探讨和交流,气氛热烈。
此次交流会为自动驾驶领域方面的学术专家和产业专家搭建了交流平台,促进与加强了双方的后续合作。研究院今后力争在校企交流与合作常态化方面作出进一步努力,也将为产业界提供多层次的综合服务,为解决国家和地方产业关键问题作出贡献。


