近日,南方科技大学斯发基斯可信自主系统研究院与澳门大学、深圳元戎启行科技有限公司共同合作,在国际顶级学术期刊 IEEE Transactions on Intelligent Transportation Systems (T-ITS) 上发表题为 “TSceneJAL: Joint Active Learning of Traffic Scenes for 3D Object Detection” 的文章。T-ITS是智能交通领域最具影响力的国际顶级期刊之一,专注于交通系统智能化理论、技术、与应用突破。
自动驾驶中的 3D 目标检测任务高度依赖高质量、精确标注的数据集,但数据标注成本极为高昂。主动学习(Active Learning)作为一种极具潜力的解决方案,能够智能筛选少量未标注数据进行标注,在大幅降低标注成本的同时保持模型性能。然而,传统主动学习算法在自动驾驶数据采集过程中,往往面临类别不平衡、场景冗余度高、复杂度不足等挑战。针对这一问题,研究团队提出了一种创新性的三阶段联合主动学习框架——TSceneJAL,如图1所示。该方法通过动态优化数据的平衡性、多样性和复杂性,实现“以最少标注数据训练最优模型”。1)类别熵采样:首阶段筛选多类别共存场景,缓解类别不平衡。 2)场景图相似性度量:将交通场景建模为有向图(节点表示物体类别,边表示空间距离),利用 MarginalizeKernel 算法量化图间距离,剔除高相似性冗余场景。3)混合密度网络不确定性采样:在检测模型中引入混合高斯分布网络,同步估计数据噪声不确定性(Aleatoric Uncertainty)与模型认知不确定性(Epistemic Uncertainty),优先选择不确定度高的复杂场景。
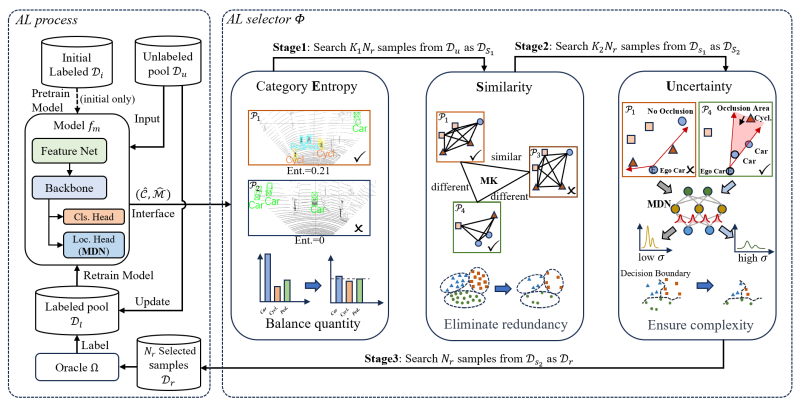
图1. 提出的TSceneJAL主动学习系统框架
在多个数据集上的实验结果表明,TSceneJAL 在 3D 目标检测的主动学习任务中达到了国际领先水平,如图2所示。与现有方法相比,该框架在3D平均精度等多个关键指标上最高提升 11%;在仅标注32% KITTI 数据的情况下,即可达到全量数据 92% 的检测性能;同时,对行人、自行车等弱势类别的检测精度提升10-15%,有效缓解了类别不平衡问题。
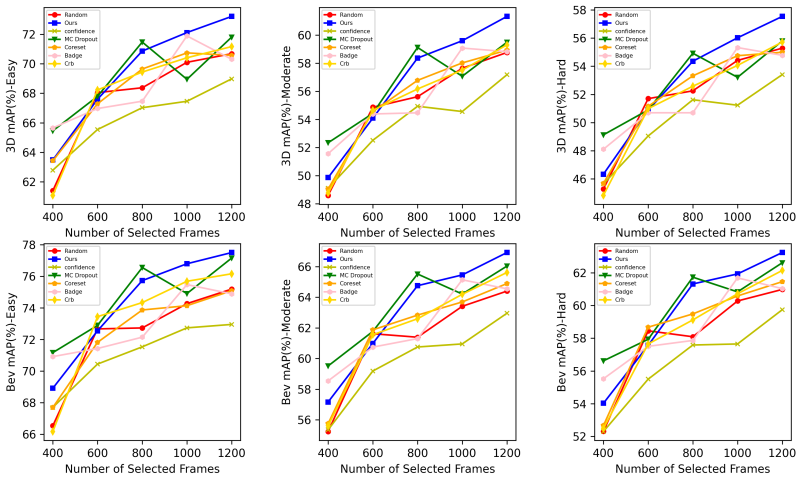
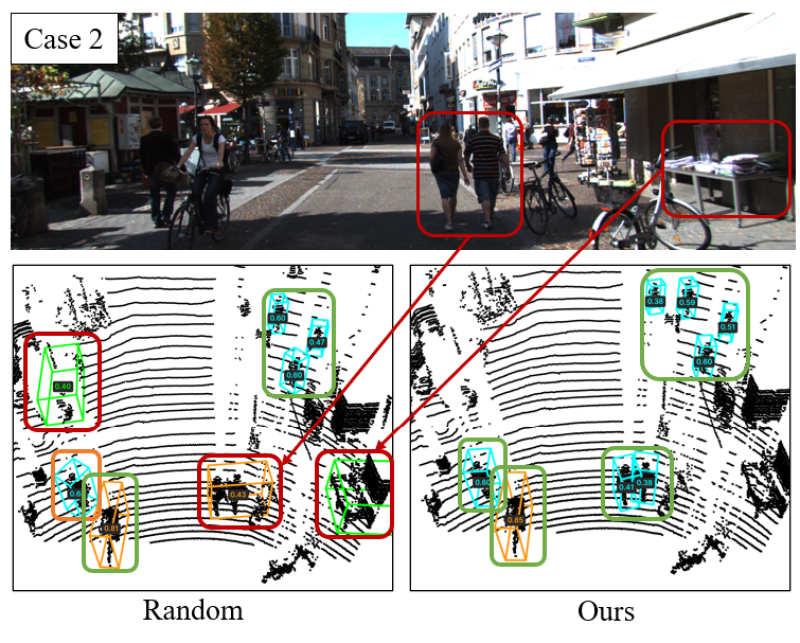
图2. 主动学习采样方法在KITTI数据集上感知效果比较
南方科技大学斯发基斯可信自主系统研究院为论文第一单位。张美莹研究助理教授、郝祁教授为共同通讯作者,计算机系硕士生雷晨阳为第一作者。