近日,南方科技大学斯发基斯可信自主系统研究院自动驾驶中心郝祁教授团队在机器人领域顶级期刊 IEEE Transactions on Robotics 发表题为 “NeuPAN: Direct Point Robot Navigation with End-to-End Model-based Learning”
在杂乱且未知的环境中导航一台非完整约束机器人,需要准确的感知和精确的运动控制以实现实时避碰。本团队提出了NeuPAN:一种实时、高精度、无需地图、易于部署且环境无关的机器人运动规划器。NeuPAN 利用紧密耦合的感知到控制框架,与现有方法相比具有两项关键创新:1. 它直接将原始点云数据映射到潜在距离特征空间,以生成无碰撞运动,避免了感知到控制管道中的误差传播,从而实现了高精度的控制动作。 2. 它从端到端基于模型的学习角度具有可解释性,因此无需大量动手工程即可推广到各种不同情形。 NeuPAN 的核心在于使用一个即插即用(PnP)的近端交替最小化网络(PAN)求解带有大量点级约束的端到端数学模型,将神经元融入其中,从而使其能够生成实时且物理上可解释的运动。该方法无缝整合了数据和知识引擎,同时其网络参数也可通过反向传播进行微调。
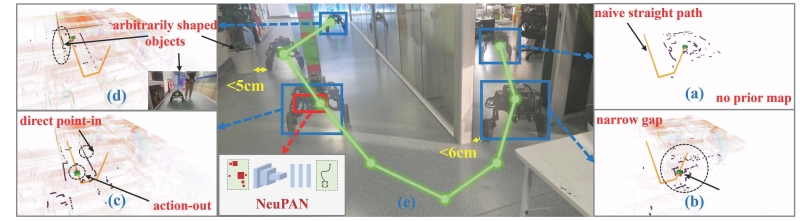
图1. NeuPAN 驱动的轮腿机器人在办公室环境无地图导航效果
团队在不同的仿真和机器人实物平台上,包括地面移动机器人、轮足机器人和自动驾驶汽车,进行了大量模拟与真实环境的评估。结果显示,团队提出的NeuPAN 在准确性、效率、鲁棒性以及在包括杂乱沙箱、办公室、走廊和停车场等各种环境中的泛化能力方面均优于现有导航方法。展示了其在未知和非结构化环境中,即使面对任意形状的物体,也能将不可通行的路径转变为可通行的路径,具有卓越的导航避障性能。
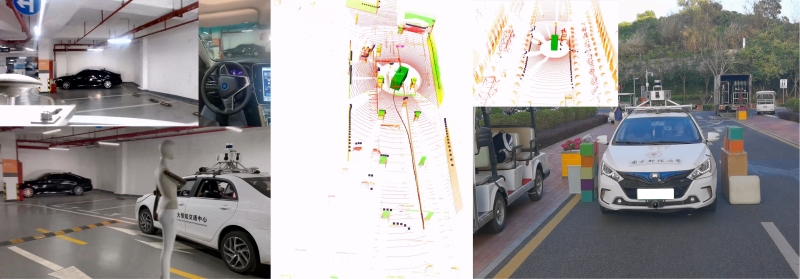
图2. 自动驾驶车辆在停车场和狭窄通道的真实导航实验

图3. NeuPAN与手动控制在结构化真实测试平台上的效果对比
郝祁教授和香港大学副教授潘佳为论文共同通讯作者。
《IEEE Transactions on Robotics》为机器人学领域公认的国际顶级期刊之一,要求论文在理论及工程实践上均能为机器人学发展做出重要贡献,其每年全球发文量约100篇,代表了机器人领域先进的重大进展,导航与规划方面的里程碑著作多数发表在该期刊上。


