Recently, Professor Hao Qi’s team from the Research Institute of Trustworthy Autonomous Systems (RITAS) at Southern University of Science and Technology(SUSTech) published a paper titled “NeuPAN: Direct Point Robot Navigation with End-to-End Model-based Learning” in IEEE Transactions on Robotics—a top-tier journal in the field of robotics.
Navigating a nonholonomic robot in a cluttered, unknown environment requires accurate perception and precise motion control for real-time collision avoidance. This paper presents NeuPAN: a real-time, highly accurate, map-free, easy-to-deploy, and environment-invariant robot motion planner. Leveraging a tightly coupled perception-to-control framework, NeuPAN has two key innovations compared to existing approaches: 1) it directly maps raw point cloud data to a latent distance feature space for collision-free motion generation, avoiding error propagation from the perception to control pipeline, resulting in high accuracy control actions. 2) it is interpretable from an end-to-end model-based learning perspective. Thus, it is generalizable to diverse situations without requiring extensive hands-on engineering. The crux of NeuPAN is solving an end-to-end mathematical model with numerous point-level constraints using a plug-and-play (PnP) proximal alternating-minimization network (PAN), incorporating neurons in the loop. This allows NeuPAN to generate realtime, physically interpretable motions. It seamlessly integrates data and knowledge engines, and its network parameters can be fine-tuned via backpropagation.
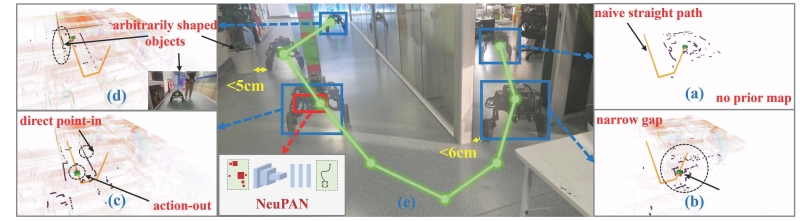
Fig.1 Wheel-legged robot mapless navigation in the office empowered by NeuPAN
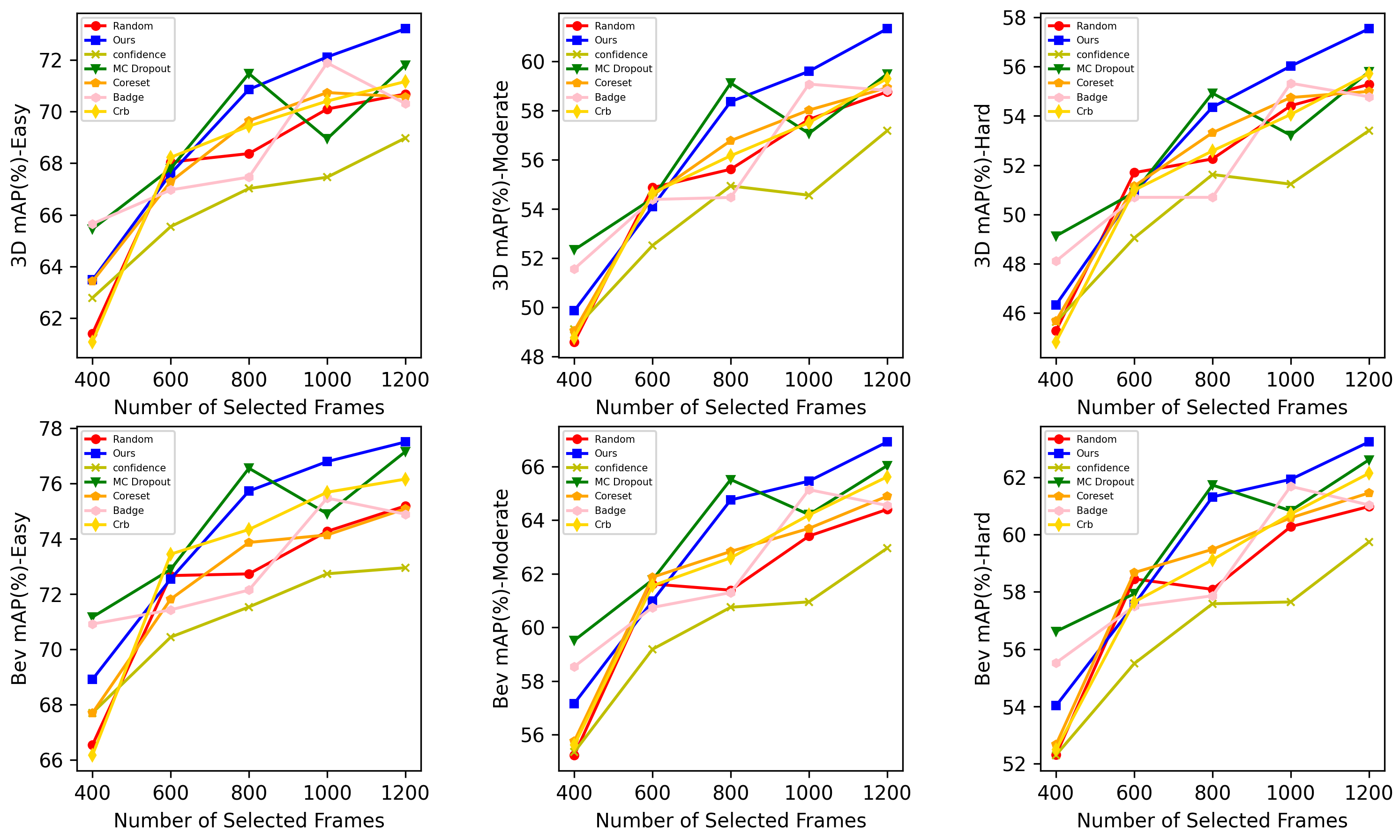
The team conducted extensive comparative experiments in extensive simulated and real-world environments, including We ground mobile robots, wheel-legged robots, and autonomous vehicles. Results demonstrate that NeuPAN outperforms existing baselines in terms of accuracy, efficiency, robustness, and generalization capabilities across various environments, including the cluttered sandbox, office, corridor, and parking lot. We show that NeuPAN works well in unknown and unstructured environments with arbitrarily shaped objects, transforming impassable paths into passable ones, and demonstrating outstanding navigation and collision avoidance performance
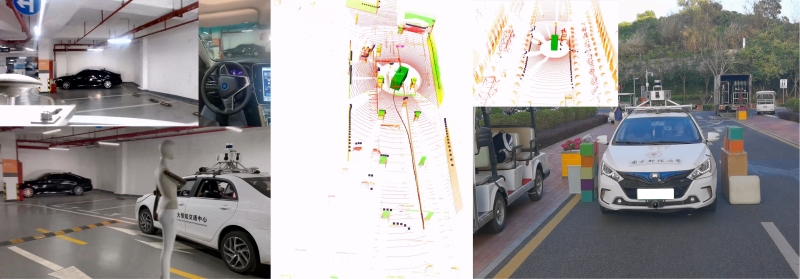
Fig.2 Real-world experiment of autonomous vehicle navigation through both a parking lot and a narrow passage

Fig.3 Trajectory comparison of manual and NeuPAN control in a structured real-world testbed
Professor Hao Qi and Associate Professor Jia Pan from the University of Hong Kong serve as the co-corresponding authors of the paper.
IEEE Transactions on Robotics is recognized as one of the world’s top-tier international journals in the field of robotics. It requires papers to make significant contributions to both the theoretical aspects and engineering practices in robotics. With approximately 100 papers published globally each year, the journal represents major advancements in robotics, and many landmark works in navigation and planning are featured in its issues.